Week 3 (Ch05)
Motor Control Theories
Ovande Furtado Jr., PhD. 
Associate Professor, California State University, Northridge
2025-10-05
1 Concept
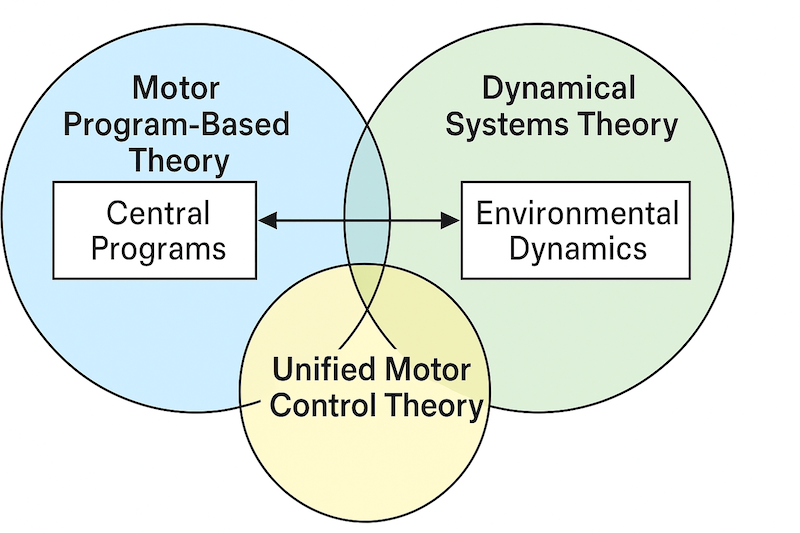
- Theories about how we control coordinated movement differ in terms of the roles of central and environmental features of a control system
Fig. 1.0: Theories about how we control coordinated movement differ in terms of the roles of central and environmental features of a control system.
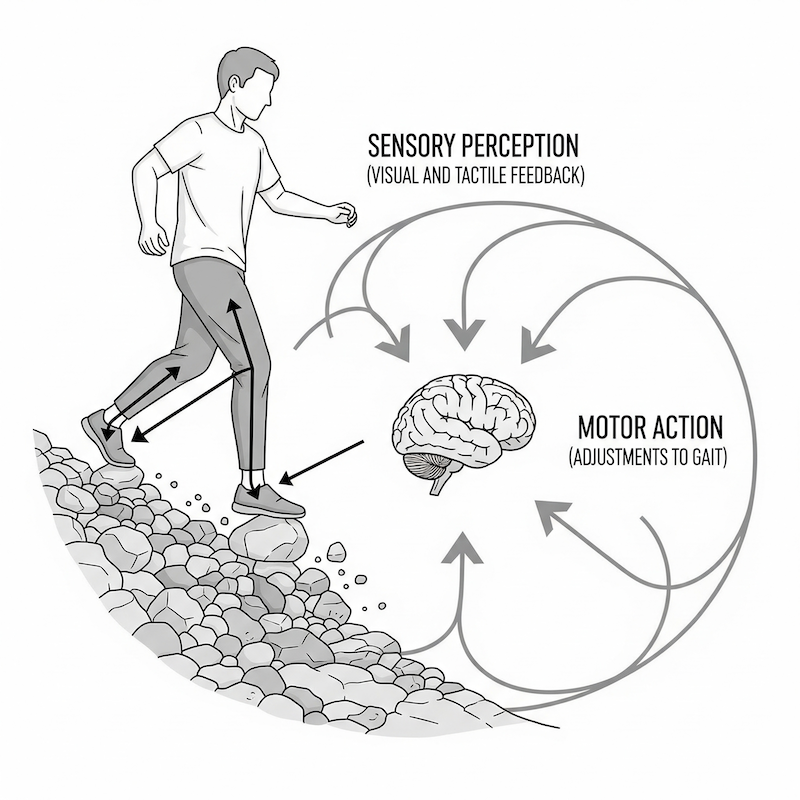
2 Actions are Continuously Adapted to the Environment
- Movement behavior is constantly adjusted based on environmental demands
- Real-time adaptation is essential for successful motor performance

3 What is a Theory?
- Accurately describes a large class of observations
- Makes definite predictions about results of future observations (Hawking, 1996)
- Motor learning and control theories focus on:
- Explaining human movement behavior
- Providing explanations about why people perform skills as they do
4 How Does Theory Relate to Professional Practice?
- Provides the “why” basis for what practitioners do
- Bridges the gap between scientific understanding and practical application

5 Relevance of Theory for Practitioners
- Theory guides evidence-based practice
- Helps practitioners understand the mechanisms behind movement
- Improves intervention and training strategies
- Enables better prediction of outcomes
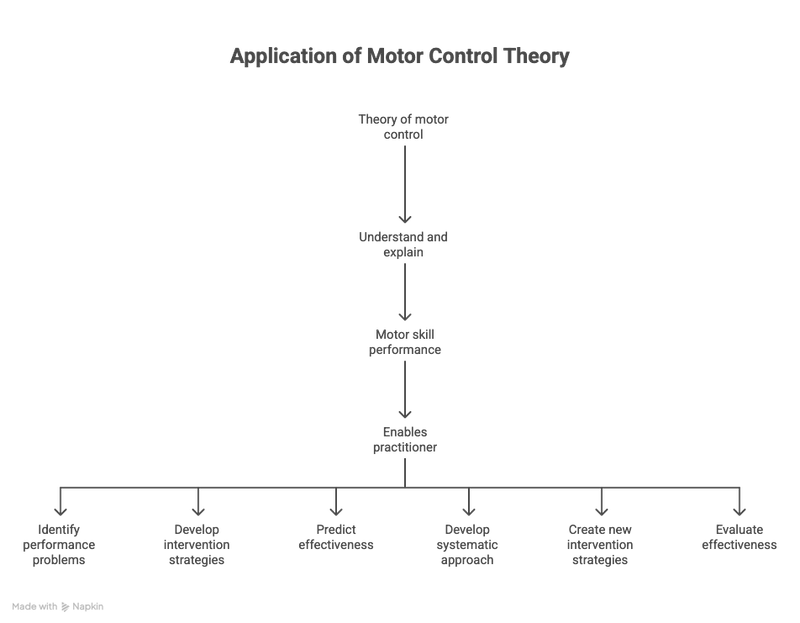
Chart adapted from Magill & Anderson (2017)
6 Motor Control Theory
- Describes and explains how the nervous system produces coordinated movement during motor skill performance in a variety of environments
- Two important terms:
- Coordination
- The degrees of freedom problem
7 Coordination Definition
- Patterning of body and limb motions relative to the patterning of environmental objects and events (Turvey, 1990)
- Two parts to consider:
- Relations among joints and body segments at a specific point of time
- Relation between pattern of coordination and the environment so the action can be accomplished

8 Coordination in a Soccer Kick
- Angle-Angle Diagram (Anderson & Sidaway, 1994)
- Demonstrates the coordinated relationship between joints during movement
- Shows how different joints work together in a coordinated pattern
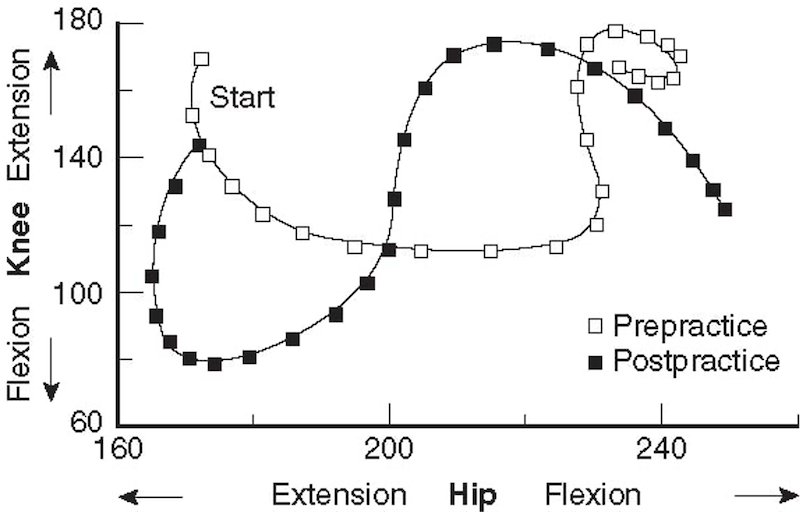
Image credit: Magill & Anderson (2017)
9 Degrees of Freedom Problem
- Degrees of freedom (df) = Number of independent elements in a system and the ways each element can act
- Degrees of freedom problem = How to control the df to make a complex system act in a specific way
- Example: The control of a helicopter’s flight
- For movement: How does the nervous system control the many df of muscles, limbs, and joints to enable a person to perform an action as intended?

10 Bernstein’s Classic Demonstration
- Nicolai Bernstein demonstrated the degrees of freedom problem with an experiment (originally published in Russian in 1957)
- A subject fastens a ski-stick to their belt with a weight at the far end
- Rubber tubing is attached to the stick’s end, and the subject holds the ends of the tubing in their hands
- The task: Try to follow the contours of a figure drawn on a vertical board with the point of the ski-stick, manipulating it only by pulling the rubber tubing
- The ski-stick represents one limb segment with two degrees of freedom, and the tubing acts as two antagonistic muscles, adding two more degrees of freedom, totaling four degrees of freedom in the system
- This experiment clearly shows how difficult and complicated it is to control systems requiring the coordination of even four degrees of freedom without prior motor practice
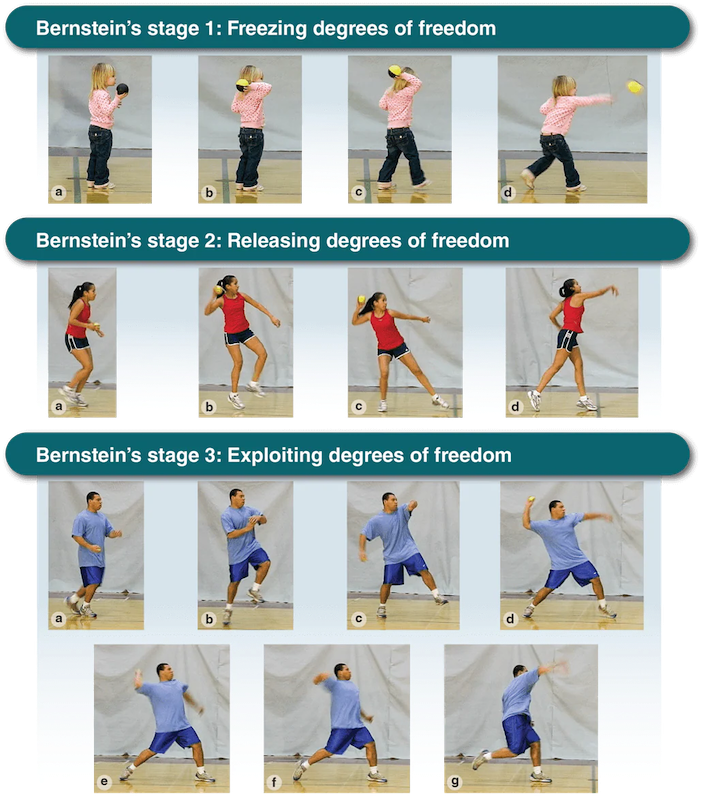
Image credit: Haywood & Getchell (2024)
11 Two General Types of Control Systems
- Open-loop control systems
- Closed-loop control systems
- Each represents different approaches to motor control
- Both are incorporated into motor control theories
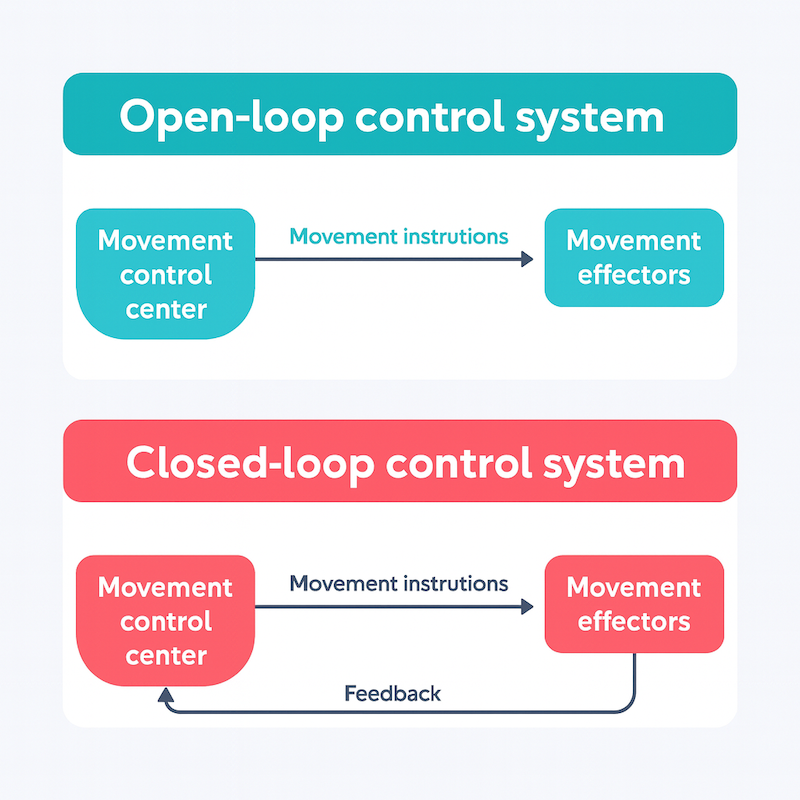
12 Open-Loop vs Closed-Loop Control Systems
- Incorporated into all theories of motor control
- Show different ways the CNS and PNS initiate and control action
- Each has a central control center (executive)
- Function to generate and forward movement instructions to effectors (i.e., muscles)
- Content of the instructions differs between systems
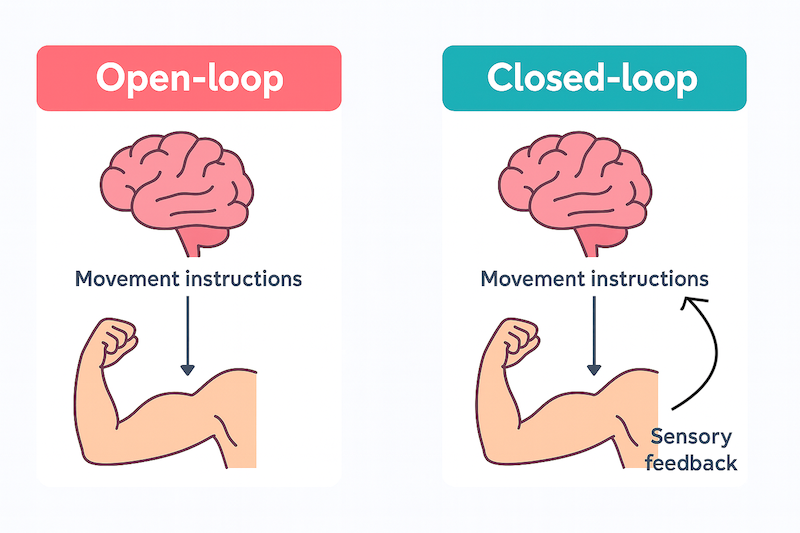
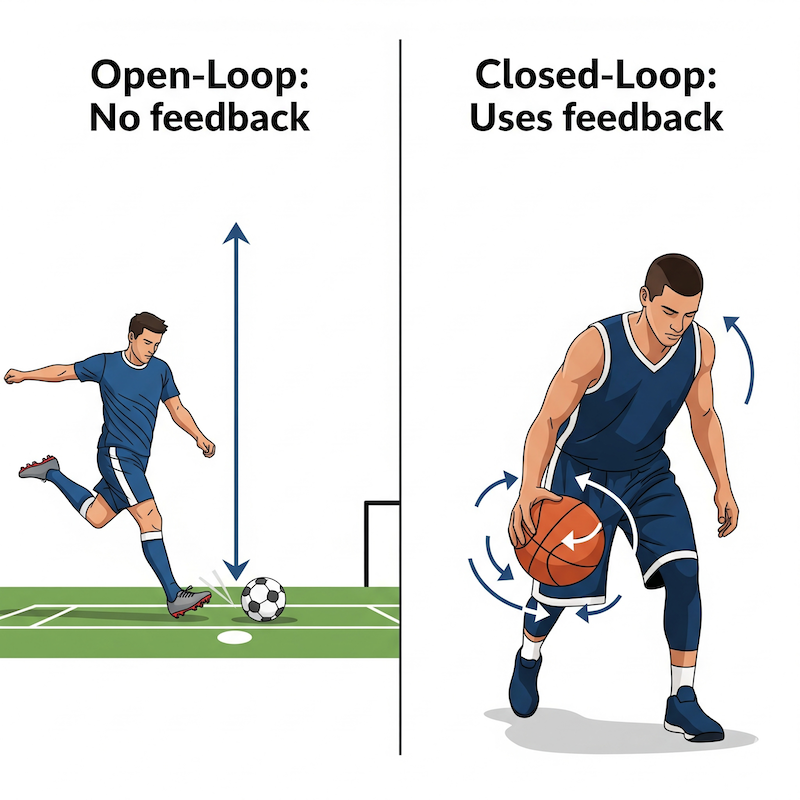
13 Differences Between the Systems
Open-Loop: - Does not use feedback - Control center provides all the information for effectors to carry out movement
Closed-Loop: - Uses feedback - Control center issues information to effectors sufficient only to initiate movement - Relies on feedback to continue and terminate movement
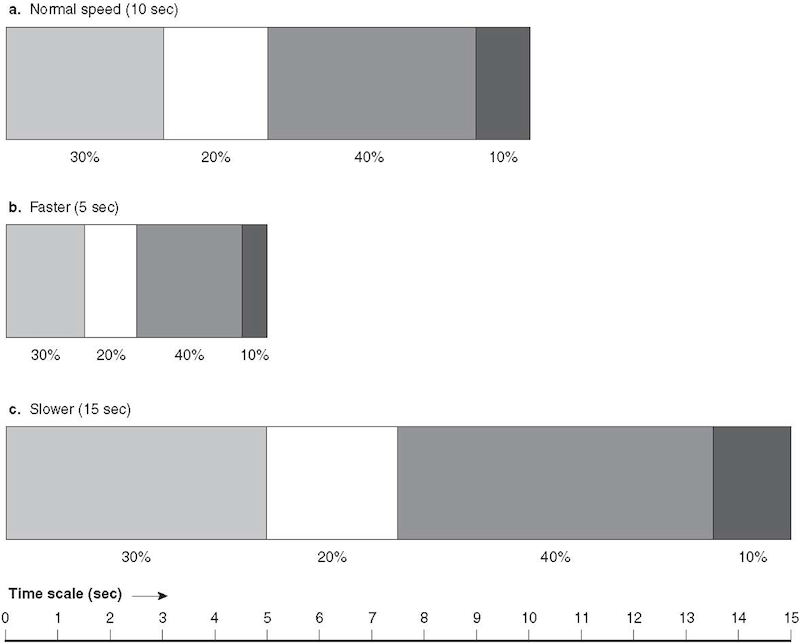
18 Analogy from Music and Dance
- Relative time = Rhythm (beat) of the music, (e.g. The 3 beats to a measure for a waltz)
- Overall time = Tempo (The speed at which you waltz)
- Regardless of how fast or slow you waltz, the rhythm remains the same (i.e. invariant)

19 Illustration of Invariant Relative Time
- Demonstrates how relative timing remains consistent across different performance speeds
- Shows the fundamental principle of motor program theory
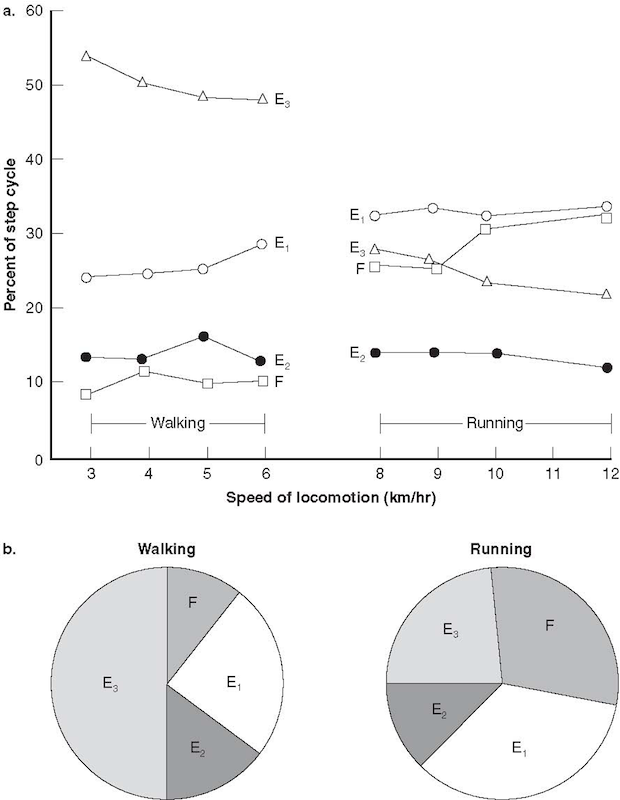
20 Testing Relative Time Invariance (Shapiro et al., 1981)
- Used gait characteristics to test prediction of relative time invariance for a class of actions controlled by a GMP
- Research question: Are walking and running one or two classes of action?
- Assessed 4 components of 1 step cycle
- Calculated relative time for each component at 9 speeds (3 – 12 km/hr)
- Relative time = % of total time for each component in 1 step cycle
21 Shapiro et al. (1981) Results
- Relative time similar within speeds when walking but different from speeds when running
- Similar relative time within speeds when running
- Suggests walking and running are controlled by different GMPs
23 Concepts Based on Non-Linear Dynamics
- Behavioral changes are not always continuous - linear progressions - but are often sudden or abrupt
- Behavior is organized by the interactions among task, environmental, and organismic constraints
- Behaviors self-organize in response to constraints
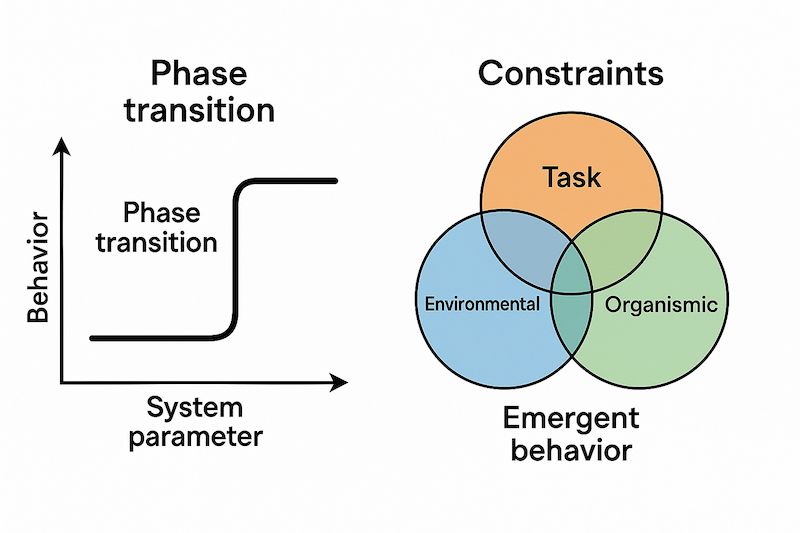
27 Self-Organization
- Behavior that spontaneously emerges in response to a particular set of constraints
- No one constraint is any more important than another in determining how the behavior is organized
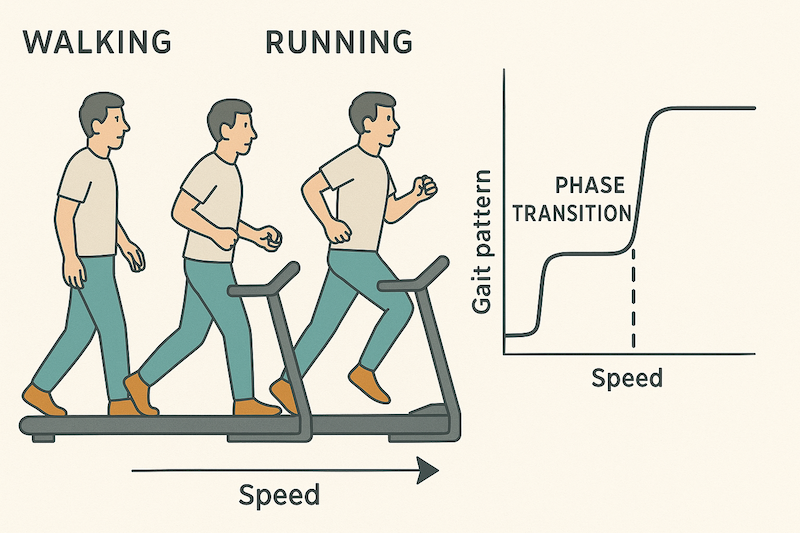
28 Examples of Self-Organization - Gait Transitions
- A person begins walking on treadmill at a slow speed
- Treadmill speed (control parameter) increases gradually
- Person shifts to running at a certain speed [not same speed for all people]
- Same effect if person begins running on treadmill - shifts to walk at certain speed
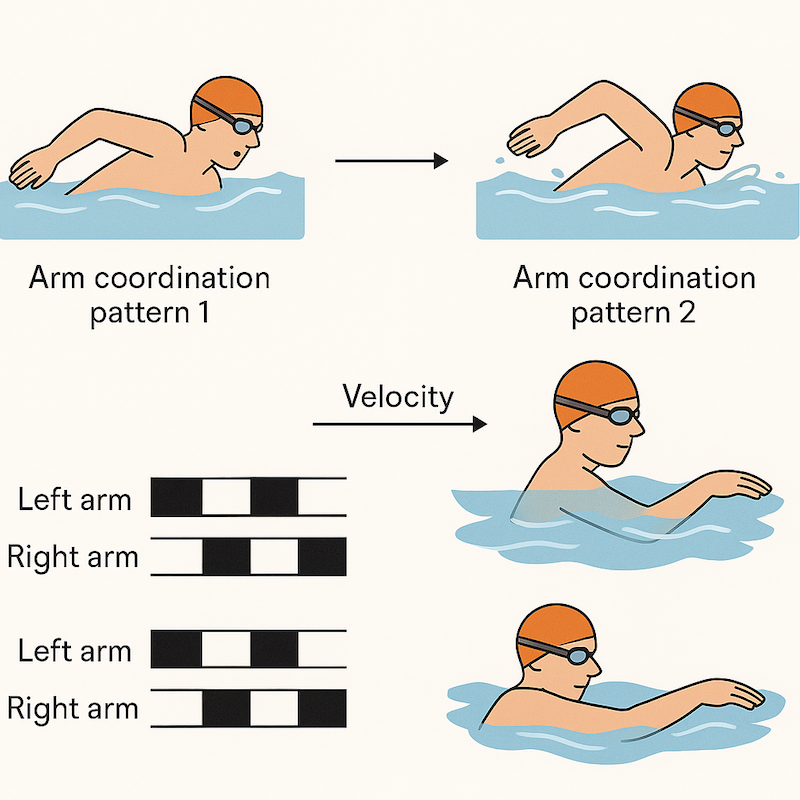
29 Examples of Self-Organization - Swim Stroke Transitions
- Seifert, Chollet & Bardy (2004)
- Each trial involved a swim velocity increase [began at preferred velocity]
- Arm-stroke analysis showed 2 distinct patterns of arm coordination
- Began in one mode but abruptly shifted to 2nd mode at a specific swim velocity
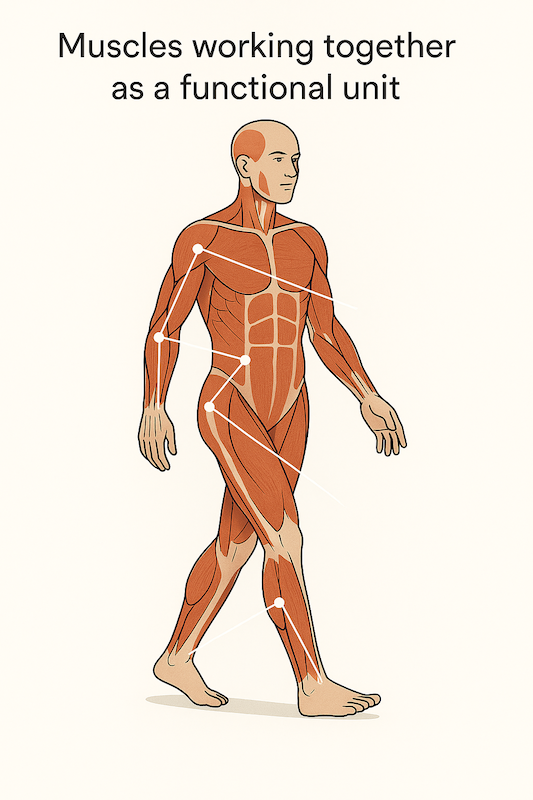
30 Coordinative Structures (Muscle Synergies)
- Groups of muscles (and joints) constrained to act as functional units
- If a perturbation stops one set of muscles from working, another automatically compensates
- Example: walking with a leg in a cast
- Develop through practice, experience, or naturally
- What are some other examples?
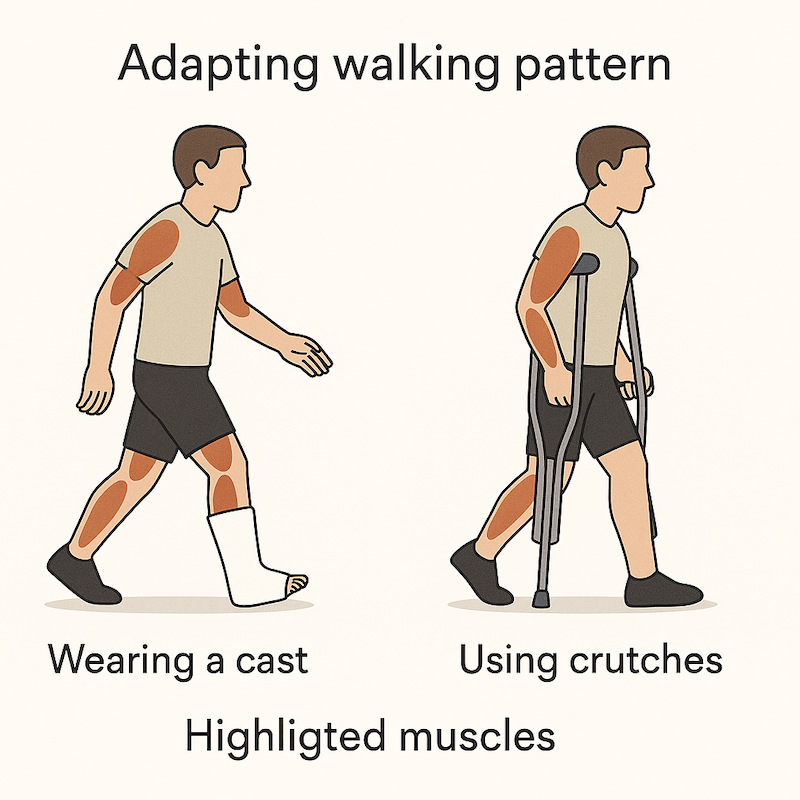
31 A Coordinative Structure
- Demonstrates functional muscle groupings
- Shows automatic compensation mechanisms
- Illustrates flexibility within constraints
32 Perception-Action Coupling (1)
- The linking together (i.e., coupling) of information and actions/movements
- The perception part:
- The detection and utilization of critical information for the control of action
- The action part:
- The various movements that are regulated by the perceived information
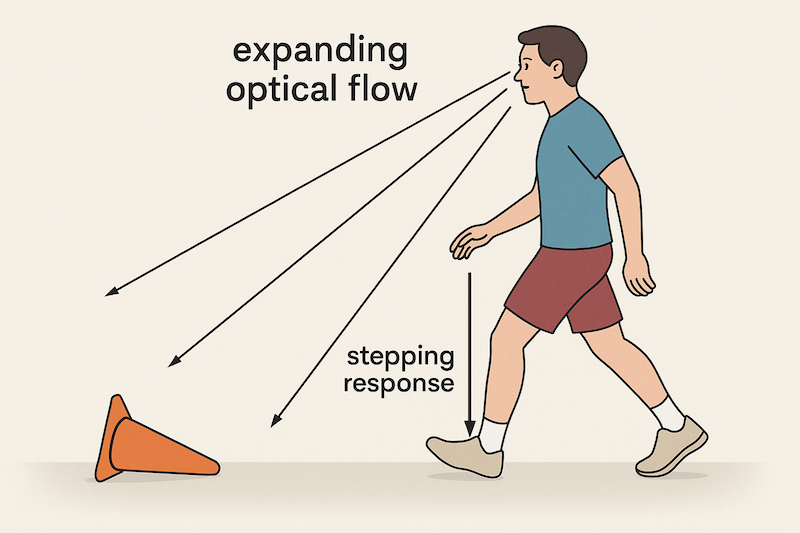
33 Perception-Action Coupling (2)
- An example:
- When walking, the time to contact an object in your pathway (specified by the perceived rate of change of the object’s size) determines when you initiate stepping over the object
- Your stepping action is “coupled” with your visual perception of the approaching object
34 Affordances
- Possibilities for action
- The reciprocal fit between characteristics of the person and the environment that allow certain actions to happen
- Example: the ratio of leg length to stair height determines whether a set of stairs is climbable
35 Present State of the Control Theory Issue
- Currently, both the motor program-based theory and dynamical systems theory predominate
- Research investigating each has shown that a theory of motor control cannot focus exclusively on movement information specified by the CNS
- Task and environmental characteristics must also be taken into account
- Speculation exists that a hybrid of the two theories as a compromise theory could emerge to explain the control of coordinated movement